336x280(권장), 300x250(권장), 250x250, 200x200 크기의 광고 코드만 넣을 수 있습니다.
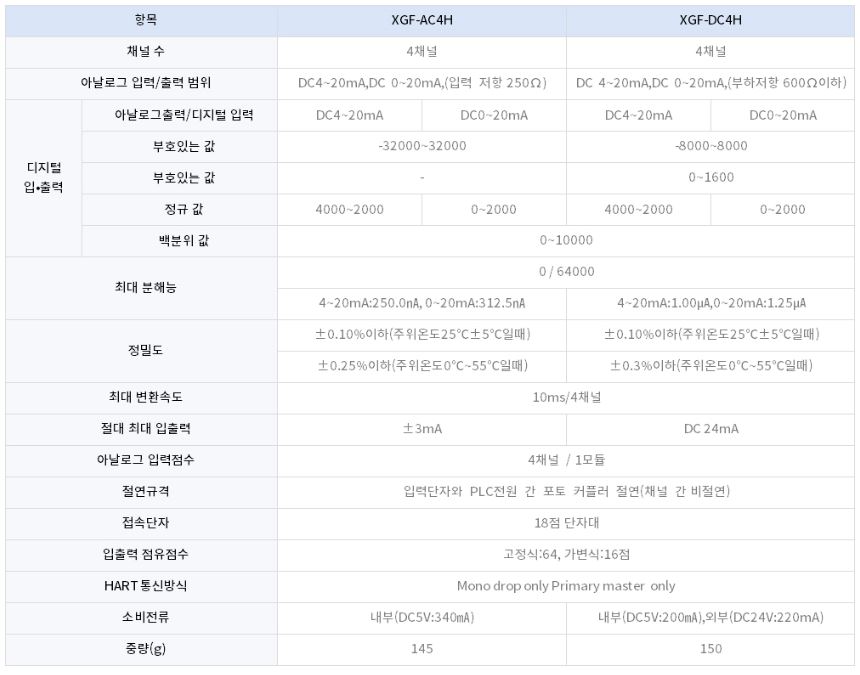
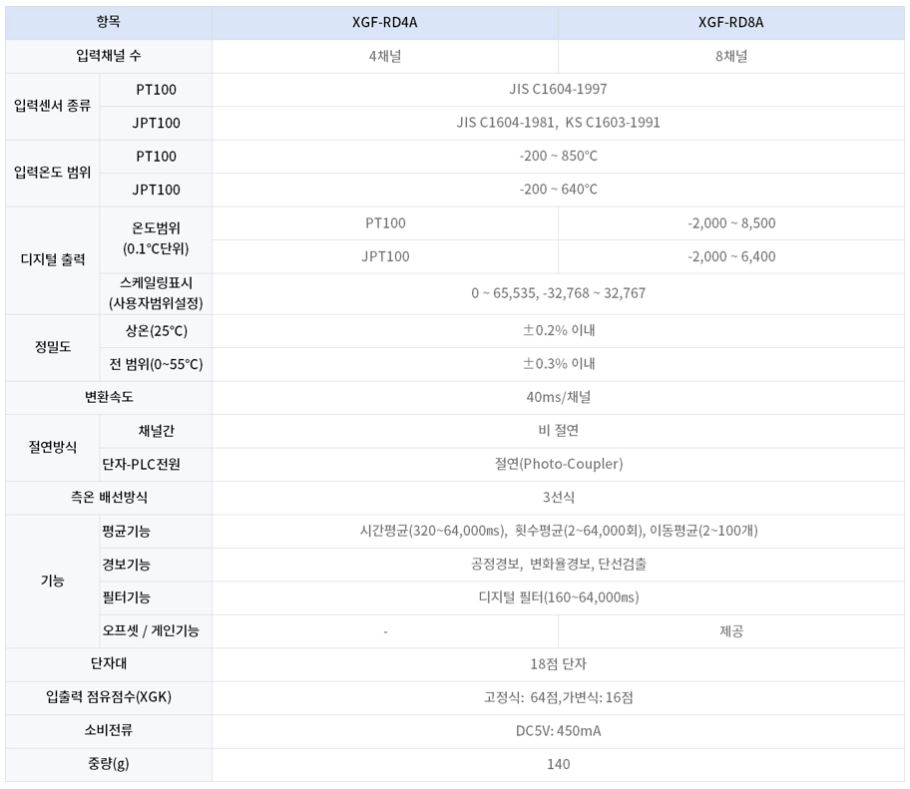
LS산전 위치결정모듈
에러 종류와 조치 방법입니다.
* 자세한 내용은 메뉴얼을 참고하세요.
(servo로 검색 시 XGT 서보 메뉴얼이 나옵니다.)
1. 기본 파라미터 관련 에러
101
기본 파라미터의 속도 제한치 값이 범위를 벗어났습니다.
기본 파라미터의 속도 제한치는 pulse단위를 기준으로 1 이상 20,000,000이하로 입력하십시오.
104
각속도로 변환된 기본 파라미터의 속도 제한치가 180도 이상이므로 원호(타원)보간을 실행할 수 없 습니다.
원호(타원)보간 주축의 속도 제한치를 낮추어 운전하십시오.
2. 확장 파라미터 관련 에러
111
확장 파라미터의 소프트 상하한 값 범위를 벗어났습니다.
확장 파라미터의 소프트 상한 값을 소프트 하한 값보다 크거나 같게 설정하십시오.
112
확장 파라미터의 M코드 모드 값 범위 벗어났습니 다.
확장 파라미터의 M코드 출력은 0:None 1:With 2:After입니다. 이 세 가지 중 하나를 선택하십시오.
113
확장 파라미터의 S-커브 비율 값 범위 벗어났습니 다.
확장 파라미터의 S-커브 비율을 1 이상 100 이하의 값으로 설정하 십시오.
3. 수동운전 파라미터 관련 에러
121
수동운전 파라미터의 조그 고속 속도 값이 범위를 벗어났습니다.
수동운전 파라미터의 조그 고속 속도 값을 수동운전 파라미터의 조 그 저속 속도 값 이상이고, 기본 파라미터의 속도 제한치 이하로 설정하십시오.
122
수동운전 파라미터의 조그 저속 속도값이 범위를 벗어났습니다.
수동운전 파라미터의 조그 저속 속도 값을 1 이상이고 수동운전 파 라미터의 조그 고속 속도 값 이하로 설정하십시오.
123
수동운전 파라미터의 인칭 속도값이 범위를 벗어났습니다.
수동운전 파라미터의 인칭 속도 값을 1 이상이고, 기본 파라미터의 속도 제한치 이하로 설정하십시오.
4. 공통 파라미터 관련 에러
141
공통 파라미터의 엔코더 펄스 입력 모드 값이 범위를 벗어났습니다.
공통 파라미터의 엔코더 펄스 입력을 0에서 5 사이의 값으로 설정하십시오.
148
공통 파라미터의 엔코더 1 최댓값, 최솟값 범위를 벗어났습니다.
공통 파라미터의 엔코더 1의 최소값은 최대값보다 작게 설정하십시 오. 또한 최소값과 최대값의 범위가 엔코더1의 현재 위치를 포함하 게 설정하십시오.
149
공통 파라미터의 엔코더 2 최댓값, 최솟값 범위를 벗어났습니다.
공통 파라미터의 엔코더 2의 최소값은 최대값보다 작게 설정하십시 오. 또한 최소값과 최대값의 범위가 엔코더2의 현재 위치를 포함하 게 설정하십시오.
5. 운전 데이터 관련 에러
151
운전 데이터의 운전 속도 값은 0 이하로 설정할 수 없습니다.
운전 속도 값을 0보다 큰 값으로 설정하십시오.
152
운전데이터의 운전 속도 값이 속도 제한치를 초과했습니다.
운전 속도 값을 기본 파라미터에 설정된 속도 제한치 이하로 설정하십시오.
155
운전 데이터의 운전패턴(종료/계속/연속) 설정 범위 를 벗어났습니다.
운전할 운전 데이터의 운전패턴을 0:종료 1:계속 2:연속 중 하나로 설정하십시오.
156
운전데이터의 운전패턴이 연속이지만 다음 명령이 연속운전을 실행할 수 없는 명령입니다.
현재 스텝의 명령이 단축위치제어인 경우 다음 스텝의 명령을 단축 위치제어나 속도제어로 설정하십시오. 현재스텝의 명령이 보간 명 령인 경우 다음스텝의 명령을 보간 명령으로 설정하십시오.
157
운전 데이터의 운전패턴이 연속이지만, 다음 명령의 종축이 현재 명령의 종축과 같지 않지 않습니다.
운전 패턴이 연속인 경우 현재 스텝의 운전 데이터와 다음 스텝의 운 전 데이터의 종축을 같게 설정하십시오.
158
운전 데이터의 운전패턴이 연속이지만 현재 명령이 연속운전을 실행할 수 없는 명령입니다.
연속운전은 현재 스텝의 명령이 단축 위치제어, 직선 보간, 원호 보간인 경우만 실행할 수 있습니다. 다른 명령인 경우 운전방식을 종료 나 계속으로 변경하십시오.
159
운전 데이터의 목표 위치가 위치표현 범위를 벗어났 습니다.
좌표가 상대인 위치제어 운전의 경우 목표위치가 펄스 단위로 2147483648 이상, 2147483647 이하의 범위가 되도록 목표 위치(증분 량)를 작게 설정하십시오.
6. 데이터 쓰기 관련 에러
171
XG-PM에서 공통 파라미터 전송 중 기동 명령이 실 행 되어 파라미터 쓰기를 완료할 수 없습니다.
현재 운전이 완료된 후 에러 리셋 명령으로 에러를 제거하고 파 라미터 쓰기를 다시 실행하십시오. 파라미터 전송 중에는 기동 명령을 실행하지 마십시오.
172
XG-PM에서 운전 파라미터 전송 중 기동 명령이 실 행 되어 파라미터 쓰기를 완료할 수 없습니다.
현재 운전이 완료된 후 에러 리셋 명령으로 에러를 제거하고 파 라미터 쓰기를 다시 실행하십시오. 파라미터 전송 중에는 기동 명령을 실행하지 마십시오.
173
XG-PM에서 운전 데이터 전송 중 기동 명령이 실행되 어 운전데이터 쓰기를 완료할 수 없습니다.
현재 운전이 완료된 후 에러 리셋 명령으로 에러를 제거하고 운 전 데이터 쓰기를 다시 실행하십시오. 운전 데이터 전송 중에는 기동 명령을 실행하지 마십시오.
174
XG-PM에서 캠 데이터 전송 중 기동 명령이 실행되어 운전 데이터 쓰기를 완료할 수 없습니다.
현재 운전이 완료된 후 에러 리셋 명령으로 에러를 제거하고 캠 데이터 쓰기를 다시 실행하십시오. 캠 데이터 전송 중에는 기동 명령을 실행하지 마십시오.
175
XG-PM에서 전송된 파라미터 또는 운전 데이터를 쓰는 중 기동 명령을 실행할 수 없습니다.
파라미터 또는 운전 데이터 쓰기 완료 후 명령을 다시 실행하십 시오.
176
XG-PM에서 서보 파라미터 전송 중 기동 명령이 실 행 되어 서보 파라미터 쓰기를 완료할 수 없습니다.
현재 운전이 완료된 후 에러 리셋으로 에러를 제거하고 서보 파라 미터 쓰기를 다시 실행하십시오. 서보 파라미터 전송 중에는 기 동명령을 실행하지 마십시오.
7. 위치 결정 명령 및 보조 제어 관련 에러
201
원점복귀 명령은 운전 중인 상태에서 실행할 수 없습니다.
명령 축이 정지 후 운전 중이 아닐 때 원점복귀 명령을 실행하십시오.
203
원점복귀 명령은 서보 오프 상태에서 실행할 수 없습니다.
서보 온 명령으로 서보 온 상태로 만든 후 원점복귀 명령을 실행하 십시오.
204
서보 드라이브의 원점복귀 실행방법(P3-25)이 ‘0: 실행 안 함’으로 설정되어 있습니다.
서보 드라이브의 파라미터 중 원점복귀 방법(P3-25)을 ‘0: 실행 안 함’ 이외의 값으로 설정하고 원점복귀 명령을 실행하십시오.
205
서보 드라이브가 원점복귀(Homing) 모드를 지원하지 않아 원점복귀를 실행할 수 없습니다.
해당 서보 드라이브에서는 원점복귀 명령을 실행할 수 없습니다.
206
서보 드라이브의 원점옵셋 읽기를 완료하지 못하였 습니다.
서보드라이브의 상태를 점검한 후 원점복귀 명령을 다시 실행하십 시오.
207
서보 드라이브에서 원점 복귀 실행 중 에러가 발생 하였습니다.
서보드라이브에 설정된 원점복귀 방법이 현재 실행 가능한 상태인 지 점검한 후 원점복귀 명령을 다시 실행하십시오.
211
부동 원점 설정 명령은 운전 중인 상태에서 실행할 수 없습니다.
명령 축이 정지 후 운전 중이 아닐 때 부동 원점 설정 명령을 실행하 십시오.
212
부동원점설정 명령은 서보 오프 상태에서 실행할 수 없습니다.
서보 온 명령으로 서보 온 상태로 만든 후 부동 원점 설정 명령을 실 행하십시오.
221
직접 기동 명령은 운전 중인 상태에서 실행할 수 없습니다.
명령 축이 정지 후 운전 중이 아닐 때 직접 기동 명령을 실행하십시오.
223
직접기동 명령은 M코드 On 신호가 On 되어 있는 상 태에서 실행할 수 없습니다.
M코드 해제(MOF) 명령으로 M코드 On 신호를 Off 시킨 후 직접 기동 명령을 실행하십시오.
224
직접기동 명령이 원점 미결정 상태의 절대좌표에서 는 실행할 수 없습니다.
원점복귀 명령이나 부동 원점 설정 명령으로 원점 결정 상태로 만든 후 절대좌표 직접 기동 명령을 실행하십시오.
225
직접기동 명령은 서보 오프 상태에서 실행할 수 없습니다.
서보 온 명령으로 서보 온 상태로 만든 후 직접 기동 명령을 실행하 십시오.
226
직접기동 명령의 최단거리 제어는 상대 좌표에서는 실행할 수 없습니다.
위치결정 좌표를 절대좌표로 변경한 후 명령을 실행하십시오.
227
무한길이 반복 모드에서 최단거리 위치제어 시 목 표위치 설정이 잘못되었습니다.
무한길이 반복모드에서 최단거리 위치제어 시는 목표위치를 0이상 이고, 확장파라미터의 "무한길이 반복위치" 이하로 설정하십시오.
230
간접기동의 연속운전은 FEED 제어에서는 실행할 수 없습니다.
제어방식이 FEED 제어이고 운전패턴이 연속인 경우, 운전패턴을 종료 또는 계속으로 변경한 후 간접기동 명령을 실행하십시오.
231
간접기동 명령은 운전 중인 상태에서 실행할 수 없 습니다.
명령축이 정지 후 운전 중이 아닐 때 간접기동 명령을 실행하십시오.
233
간접기동 명령은 M코드 On 신호가 On 되어 있는 상 태에서 실행할 수 없습니다.
M코드해제(MOF) 명령으로 M코드 On 신호를 Off시킨 후 간접기동 명령을 실행하십시오.
234
간접기동 명령이 원점 미결정 상태의 절대좌표에서 는 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 원점결정 상태로 만든 후 절대좌표 간접기동 명령을 실행하십시오.
235
간접기동 명령은 서보 오프 상태에서 실행할 수 없 습니다.
서보온 명령으로 서보 온 상태로 만든 후 간접기동 명령을 실행하 십시오.
236
간접기동의 연속운전은 속도제어에서는 실행할 수 없습니다.
제어방식이 속도제어이고 운전패턴이 연속운전인 경우, 운전패턴 을 종료 또는 계속으로 변경한 후 간접기동 명령을 실행하십시오.
237
포인트 운전의 스텝개수는 0이거나 20개를 초과할 수 없습니다.
포인트 운전을 할 스텝의 개수를 1 이상 20 이하로 설정해 주십시오.
238
간접기동의 연속운전은 S-커브 가감속 패턴에서는 실행할 수 없습니다.
명령축의 확장파라미터의 가감속 패턴을 사다리꼴 운전으로 변경 한 후 간접기동 명령을 실행하십시오.
239
간접기동의 연속운전은 주축 또는 종축이 무한길이 반복 "허용" 상태에서는 실행할 수 없습니다.
주축 또는 종축의 무한길이 반복 설정을 "0: 금지"로 하거나, 운 전패턴을 "종료" 또는 "계속"으로 바꾼 후 명령을 실행하십시오.
240
간접기동의 보간운전은 주축 또는 종축이 무한길이 반복 "허용" 상태에서는 실행할 수 없습니다
주축 또는 종축의 무한길이 반복 설정을 "0: 금지"로 변경한 후 명령을 실행하십시오.
241
직선보간 주축이 운전 중인 상태에서 직선보간 운 전을 실행할 수 없습니다.
주축이 정지 후 운전 중이 아닐 때 직선보간을 실행하십시오.
242
직선보간 종축이 운전 중인 상태에서 직선보간 기 동을 실행할 수 없습니다.
종축이 정지 후 운전 중이 아닐 때 직선보간을 실행하십시오.
247
직선보간 주축의 M코드 On 신호가 On되어있는 상태 에서 직선보간 기동을 실행할 수 없습니다.
M코드해제(MOF) 명령으로 주축의 M코드 On 신호를 Off시킨 후 직 선보간을 실행하십시오.
248
직선보간 종축의 M코드 On 신호가 On되어있는 상태 에서 직선보간 기동을 실행할 수 없습니다.
M코드해제(MOF) 명령으로 종축의 M코드 On 신호를 Off시킨 후 직 선보간을 실행하십시오.
250
직선보간 주축이 원점미결정 상태에서 절대좌표 위 치결정운전을 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 주축을 원점결정 상태 로 만든 후 직선보간을 실행하십시오.
251
직선보간 종축이 원점미결정 상태에서 절대좌표 위 치결정운전을 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 종축을 원점결정 상태 로 만든 후 직선보간을 실행하십시오.
253
직선보간에서 주축 종축 설정이 잘못된 경우입니 다. (종축을 지정하지 않은 경우, 축을 하나만 지 정한 경우, 현재 운전 가능한 축 번호가 아닌 경 우)
직선보간 주축 운전데이터의 종축설정에 현재 네트워크에 연결된 축 들 중 주축 이외의 축을 하나 이상 설정한 후 직선보간을 실행 하십시오.
254
직선보간 주축이 서보 오프 상태에서는 운전을 실 행할 수 없습니다.
서보온 명령으로 주축을 서보 온 상태로 만든 후 직선보간을 실행 하십시오.
255
직선보간 종축이 서보 오프 상태에서는 운전을 실 행할 수 없습니다.
서보온 명령으로 종축을 서보 온 상태로 만든 후 직선보간을 실행 하십시오.
261
직선보간의 종축 속도가 속도 제한치를 벗어났습니 다.
직선보간 종축의 속도가 속도 제한치를 넘지 않도록 주축 운전데 이터의 운전속도를 낮게 설정하십시오.
262
2축 직선보간 연속운전 원호삽입 위치가 목표 위치 까지의 길이 이상 이어서 원호를 삽입할 수 없습니 다.
확장파라미터의 '2축 직선보간 연속운전 원호삽입 위치'를 목표 위치까지의 길이보다 작게 설정하십시오.
263
2축 직선보간 연속운전 원호삽입에서 두 직선이 일 직선상에 위치하므로 원호를 삽입할 수 없습니다.
원호를 삽입할 수 있도록 목표위치를 재설정하거나 확장파라미터 의 '2축 직선보간 연속운전 원호삽입' 설정을 '0: 원호삽입 안함' 으로 설정한 후 직선보간을 실행하십시오.
264
2축 직선보간 연속운전 원호삽입에서 삽입될 원호 의 반지름이 2147483647pulse를 초과하여 원호를 삽입할 수 없습니다.
두 직선이 거의 일직선상에 위치 하지 않도록 목표위치를 재설정 하거나 확장파라미터의 '2축 직선보간 연속운전 원호삽입' 설정을 '0: 원호삽입 안함'으로 설정한 후 직선보간을 실행하십시오.
265
2축 직선보간 연속운전 원호삽입에서 삽입될 원호 의 반지름의 길이가 극히 작거나 속도 제한치가 높 아 원호를 삽입할 수 없습니다.
원호삽입 위치를 더 크게 하고 속도 제한치를 더 작게 설정하거나 확장파라미터의 '2축 직선보간 연속운전 원호삽입' 설정을 '0: 원 호삽입 안함'으로 설정한 후 직선보간을 실행하십시오.
266
2축 직선보간 연속운전 원호삽입에서 원호가 삽입 될 위치 내에서의 두 직선이 일직선상에 위치하여 원호를 삽입할 수 없습니다.
두 직선이 거의 일직선상에 위치 하지 않도록 목표위치를 재설정 하거나 확장파라미터의 '2축 직선보간 연속운전 원호삽입' 설정을 '0:원호삽입 안함'으로 설정한 후 직선보간을 실행하십시오.
270
원호보간 반지름 방식에서 반지름 설정 에러입니 다.
원호보간 주축 운전데이터의 반지름 설정값이 시작점에서 끝점까 지의 길이의 반보다 80%이상 되게 설정하십시오.
271
원호보간 주축이 운전 중인 상태에서 원호보간을 실행할 수 없습니다.
주축이 정지 후 운전 중이 아닐 때 원호보간을 실행하십시오.
272
원호보간 종축이 운전 중인 상태에서 원호보간을 실행할 수 없습니다.
종축이 정지 후 운전 중이 아닐 때 원호보간을 실행하십시오.
275
원호보간 주축의 M코드 On 신호가 On 되어 있는 상 태에서 원호보간 기동을 실행할 수 없습니다.
M코드해제(MOF) 명령으로 주축의 M코드 On 신호를 Off 시킨 후 원 호보간을 실행하십시오.
276
원호보간 종축의 M코드 On 신호가 On 되어 있는 상 태에서 원호보간 기동을 실행할 수 없습니다.
M코드해제(MOF) 명령으로 종축의 M코드 On 신호를 Off 시킨 후 원 호보간을 실행하십시오.
277
원호보간 주축이 원점미결정 상태에서 절대좌표 위 치결정운전을 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 주축을 원점결정 상태 로 만든 후 원호보간을 실행하십시오.
278
원호보간 종축이 원점미결정 상태에서 절대좌표 위 치결정운전을 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 종축을 원점결정 상태 로 만든 후 원호보간을 실행하십시오.
279
원호보간에서 주축 종축 설정이 잘못되었습니다. (종축을 지정하지 않은 경우, 헬리컬 보간 축 설정 이 잘못된 경우, 현재 운전 가능한 축 번호가 아닌 경우)
원호보간 주축 운전데이터의 종축설정에 현재 네트워크에 연결된 축들 중 주축 이외의 축을 하나 설정하고, 헬리컬 보간 실행 시 헬리컬보간 설정에 현재 네트워크에 연결된 축들 중 주축과 종축 이외의 축을 설정한 후 원호보간을 실행하십시오.
280
원호보간 주축이 서보 오프 상태에서는 운전을 실 행할 수 없습니다.
서보온 명령으로 주축을 서보 온 상태로 만든 후 원호보간을 실행 하십시오.
281
원호보간 종축이 서보 오프 상태에서는 운전을 실 행할 수 없습니다.
서보온 명령으로 종축을 서보 온 상태로 만든 후 원호보간을 실행 하십시오.
282
원호보간에서 주축의 단위가 degree인 경우 운전을 실행할 수 없습니다.
원호보간 주축의 기본 파라미터의 단위를 degree 이외의 값으로 변경한 후 원호보간을 실행하십시오.
283
원호보간에서 종축의 단위가 degree인 경우 운전을 실행할 수 없습니다.
원호보간 종축의 기본 파라미터의 단위를 degree 이외의 값으로 변경한 후 원호보간을 실행하십시오.
284
원호보간에서 시작점 = 중심점(중간점) 혹은 중심 점(중간점) = 끝점이면 운전을 실행할 수 없습니 다.
원호보간에서 중심점(또는 중간점)을 시작점(또는 끝점)과 다른 위치로 설정한 후 원호보간을 실행하십시오.
285
원호보간에서 중간점(또는 반지름)방식에서는 시작 점과 끝점이 같을 수 없습니다.
원호보간 방식을 중간점(또는 반지름)으로 설정했을 경우 시작점 의 위치와 끝점의 위치를 다르게 설정한 후 원호보간을 실행하십 시오.
286
원호보간에서 반지름 설정 에러입니다.
원호보간 운전이 실행될 수 있는 원의 반지름은 1 이상이고 2147483647pulse 이하 입니다. 반지름(주축 운전데이터의 원호보 간 보조점)을 설정 범위 내에서 재설정 한 후 원호보간을 실행하 십시오.
287
원호보간에서 직선 프로파일이 나오므로 운전을 실 행할 수 없습니다.
원호보간 중간점 방식의 경우 중간점(운전데이터의 원호보간 보조 점)을 시작점과 끝점의 일직선상에 위치하지 않도록 변경한 후 원 호보간을 실행하십시오.
290
원호보간에서 각속도가 90도 이상이므로 정확한 원 을 그릴 수 없습니다.
원호보간의 각속도가 90도를 넘지 않도록 운전속도를 낮게 설정하 십시오.
291
동시기동 명령은 운전 중인 상태에서 실행할 수 없 습니다.
동시기동으로 설정한 모든 축이 정지 후 운전 중이 아닐 때 동시 기동 명령을 실행하십시오.
293
동시기동 명령은 M코드 On 신호가 On되어있는 상태 에서 실행할 수 없습니다.
M코드해제(MOF) 명령으로 에러가 발생한 축의 M코드 On 신호를 Off 시킨 후 동시기동 명령을 실행하십시오.
294
동시기동 명령은 원점미결정상태의 절대좌표에서는 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 에러가 발생한 축을 원 점결정 상태로 만든 후 동시기동 명령을 실행하십시오.
295
동시기동 명령은 서보 오프 상태에서 실행할 수 없 습니다.
서보온 명령으로 에러가 발생한 축을 서보 온 상태로 만든 후 동 시기동 명령을 실행하십시오.
296
동시기동 명령 축 설정이 잘못되었습니다.
동시기동명령의 축 지정을 두 축 이상으로 설정하고 동시기동 명 령을 실행하십시오. 축 지정 번지의 0번 bit는 1축, 1번 bit는 2 축, …, 7번 bit는 8축을 의미하며 축 지정은 각 bit를 '1'로 SET 하여 설정합니다.
297
동시기동을 수행할 축들 중 에러가 발생한 축이 있 습니다.
에러가 발생한 축을 확인하여 에러요소를 제거하고 다시 동시기동 을 실행하십시오.
301
속도/위치 전환 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 위치결정 운전 중인 상태에서 속도/위치 전환 명령을 실 행하십시오.
302
속도/위치 전환 명령은 속도제어가 아닌 상태에서 실행할 수 없습니다.
명령축이 속도제어로 운전 중인 상태에서 속도/위치 전환 명령을 실행하십시오.
303
속도/위치 전환 명령은 동기운전의 종축에서는 실 행할 수 없습니다.
동기운전 종축으로 운전 중인 축에서는 속도/위치 전환 명령이 동 작하지 않습니다.
304
속도/위치 전환 명령은 목표위치 량이 0인 경우에 는 실행할 수 없습니다.
속도제어 실행 시 목표위치 량이 0인 경우에는 속도/위치 전환 명 령이 동작하지 않습니다. 목표위치 량을 0 이외의 값으로 설정하 십시오.
306
위치지정 속도/위치 전환 명령은 무한길이 반복=허 용, 속도/위치 전환 좌표=절대인 경우 운전 방향과 반대인 위치 값을 설정할 수 없습니다.
위치지정 속도/위치 전환 명령의 위치 값을 운전방향이 정방향인 경우 양수값으로, 운전방향이 역방향인 경우 음수값으로 설정하십 시오.
311
위치/속도 전환 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 위치결정 운전 중인 상태에서 위치/속도 전환 명령을 실 행하십시오.
312
위치/속도 전환 명령은 동기운전의 종축에서는 실 행할 수 없습니다.
동기운전 종축으로 운전 중인 축에서는 위치/속도 전환 명령이 동 작하지 않습니다.
313
위치/속도 전환 명령은 원호(타원)보간 운전 중에 는 실행할 수 없습니다.
원호(타원)보간 운전 중인 축에서는 위치/속도 전환 명령이 동작 하지 않습니다.
314
위치/속도 전환 명령은 직선보간 운전 중에는 실행 할 수 없습니다.
직선보간 운전 중인 축에서는 위치/속도 전환 명령이 동작하지 않 습니다.
316
위치/속도 전환 명령은 감속구간에서는 실행할 수 없습니다.
축이 감속운전 하기 전 가속구간 또는 정속구간에서 위치/속도 전 환 명령을 실행하십시오.
317
위치/속도 전환 명령은 위치제어 또는 인칭운전이 아닌 상태에서 실행할 수 없습니다.
명령축이 위치제어 또는 인칭운전으로 운전 중인 상태에서 속도/ 위치 전환 명령을 실행하십시오.
321
감속정지 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 위치결정 운전 중인 상태에서 감속정지 명령을 실행하십 시오.
322
감속정지 명령은 조그운전 중인 상태에서 실행할 수 없습니다.
조그운전의 경우는 감속정지 명령이 동작하지 않습니다. 조그운전 의 정지는 조그정지를 사용하십시오.
324
감속정지 명령의 감속시간 설정 값이 범위를 벗어 났습니다.
감속정지 명령의 감속시간의 설정값은 0이상 이고 2147483647이하 입니다. 감속시간을 설정 범위 내에서 재설정 한 후 감속정지명령 을 실행하십시오.
331
스킵 운전 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 위치결정 운전 중인 상태에서 스킵 운전 명령을 실행하 십시오.
332
스킵 운전 명령은 직선보간 운전의 종축에 대하여 실행할 수 없습니다.
직선보간 주축에 스킵 운전 명령을 실행하십시오.
333
스킵 운전 명령은 동기운전의 종축에 대하여 실행 할 수 없습니다.
동기운전 종축으로 운전 중인 축에서는 스킵 운전 명령이 동작하 지 않습니다.
335
스킵 운전 명령은 조그 운전 중인 상태에서 실행할 수 없습니다.
조그 운전 중인 축에서는 스킵 운전 명령이 동작하지 않습니다.
336
스킵 운전 명령은 직접기동 운전 중인 상태에서 실 행할 수 없습니다.
직접기동으로 운전 중인 축에서는 스킵 운전 명령이 동작하지 않 습니다.
337
스킵 운전 명령은 인칭 운전 중인 상태에서 실행할 수 없습니다.
인칭 운전 중인 축에서는 스킵 운전 명령이 동작하지 않습니다.
338
스킵 운전 명령은 원호(타원)보간 운전의 종축에 대하여 실행할 수 없습니다.
원호(타원)보간 운전의 주축에 스킵 운전 명령을 실행하십시오.
339
스킵 운전 명령은 토크 제어 중인 상태에서 실행할 수 없습니다.
토크 제어 중인 축에서는 스킵 운전 명령이 동작하지 않습니다.
341
위치동기 명령은 운전 중인 상태에서 실행할 수 없 습니다.
명령축이 정지 후 운전 중이 아닐 때 위치동기 명령을 실행하십시 오.
343
위치동기 명령은 M코드 On 신호가 On 되어 있는 상 태에서 실행할 수 없습니다.
M코드해제(MOF) 명령으로 명령축의 M코드 On 신호를 Off시킨 후 위치동기 명령을 실행하십시오.
344
위치동기 명령은 원점미결정상태의 절대좌표에서는 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 명령축을 원점결정 상 태로 만든 후 위치동기 명령을 실행하십시오.
345
위치동기 명령은 서보 오프 상태에서 실행할 수 없 습니다.
서보온 명령으로 명령축을 서보 온 상태로 만든 후 위치동기 명령 을 실행하십시오.
346
위치동기 명령은 주축이 원점결정이 되지 않은 상 태에서는 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 주축을 원점결정 상태 로 만든 후 위치동기 명령을 실행하십시오.
347
위치동기 명령의 주축/종축 설정에 오류가 있습니 다.
위치동기 명령의 주축설정을 네트워크에 연결된 축들 중 명령축과 다른 축 또는 엔코더 중 하나로 설정하십시오. 주축설정은 1(1 축)~8(8축), 9(엔코더1), 10(엔코더2) 값으로 설정합니다.
350
속도 동기 명령의 주축이 운전 중에는 실행할 수 없습니다.
속도동기의 주축이 정지 후 운전중 상태가 아닐 때 속도동기 명령 을 실행하십시오.
351
속도동기 명령은 운전 중인 상태에서 실행할 수 없 습니다.
명령축이 속도동기로 운전 중이지 않은 경우 정지 후 운전 중이 아닐 때 속도동기 명령을 실행하십시오. 명령축이 속도동기로 운 전 중인 경우 현재 설정된 주축과 같은 축으로 주축을 설정 후 속 도동기 명령을 실행하십시오.
353
속도동기 명령은 M코드 On 신호가 On 되어 있는 상 태에서 실행할 수 없습니다.
M코드해제(MOF) 명령으로 명령축의 M코드 On 신호를 Off 시킨 후 속도동기 명령을 실행하십시오.
354
속도동기 명령은 서보 오프 상태에서 실행할 수 없 습니다.
서보온 명령으로 명령축을 서보 온 상태로 만든 후 속도동기 명령 을 실행하십시오.
355
속도동기 명령의 주축/종축 설정에 오류가 있습니 다.
속도동기 명령의 주축설정을 네트워크에 연결된 축들 중 명령축과 다른 축 또는 엔코더 중 하나로 설정하십시오. 주축설정은 1(1 축)~8(8축), 9(엔코더1), 10(엔코더2) 값으로 설정합니다.
356
속도동기 명령의 주축/종축 설정에 오류가 있습니 다.
속도동기 명령의 주축비는 0으로 설정할 수 없습니다. 0을 제외한 -32768 ~ 32767 사이의 값을 설정하십시오.
357
속도 동기 명령의 종축의 속도가 속도 제한치를 넘 을 수 없습니다.
주축비, 종축비로 계산된 종축의 속도가 속도 제한치를 넘지 않도 록 종축비/주축비의 값을 작게 설정하십시오.
358
속도 동기 명령은 주축이 원점복귀 운전 중인 경우 실행할 수 없습니다. (주축이 LS메카피온 L7N/L7NH/XIP인 경우 제외)
주축이 원점복귀 운전 중이 아닌 상태에서 속도 동기 명령을 실행 해 주십시오.
361
위치 오버라이드 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 운전 중인 상태에서 위치 오버라이드 명령을 실행하십시 오.
362
위치 오버라이드 명령은 드웰 중인 상태에서 실행 할 수 없습니다.
명령축이 드웰 중이 아닌 상태에서 위치 오버라이드 명령을 실행 하십시오.
363
위치 오버라이드 명령은 위치결정 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 위치제어로 운전 중인 상태에서 위치 오버라이드 명령을 실행하십시오.
364
위치 오버라이드 명령은 직선보간 운전 중인 축에 대하여 실행할 수 없습니다.
직선보간 운전 중인 축에서는 위치 오버라이드 명령이 동작하지 않습니다.
365
위치 오버라이드 명령은 원호(타원)보간 운전 중인 축에 대하여 실행할 수 없습니다.
원호(타원)보간 운전 중인 축에서는 위치 오버라이드 명령이 동작 하지 않습니다.
366
위치 오버라이드 명령은 동기운전 종축에 대하여 실행할 수 없습니다.
동기운전의 종축으로 운전 중인 축에서는 위치 오버라이드 명령이 동작하지 않습니다.
371
속도 오버라이드 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 운전 중인 상태에서 속도 오버라이드 명령을 실행하십시 오.
372 속도 오버라이드 값 범위를 초과 했습니다.
속도 오버라이드 명령의 속도 값은 0이상, 기본 파라미터의 속도 제한치 이하가 되도록 설정하십시오.
373
속도 오버라이드 명령은 직선보간운전 종축에 대하 여 실행할 수 없습니다.
직선보간 주축에 속도 오버라이드 명령을 실행하십시오.
374
속도 오버라이드 명령은 원호(타원)보간 운전 종축 에 대하여 실행할 수 없습니다.
원호(타원)보간 주축에 속도 오버라이드 명령을 실행하십시오.
375
속도 오버라이드 명령은 동기운전 종축에 대하여 실행할 수 없습니다.
동기운전 종축을 속도 오버라이드 하기 위해서는, 동기운전 주축 에 속도 오버라이드 명령을 실행하십시오.
377
속도 오버라이드 명령은 감속구간에서는 실행할 수 없습니다.
축이 감속운전 하기 전 가속구간 또는 정속구간에서 속도 오버라 이드 명령을 실행하십시오.
378
속도 오버라이드 명령은 S-커브가감속 패턴에서는 실행할 수 없습니다.
확장파라미터의 가감속 패턴을 사다리꼴 운전으로 변경한 후 속도 오버라이드 명령을 실행하십시오.
381
임의위치 속도 오버라이드 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 운전 중인 상태에서 임의위치 속도 오버라이드 명령을 실행하십시오.
382
임의위치 속도 오버라이드 명령은 위치결정운전이 아닌 경우 실행할 수 없습니다.
임의위치 속도 오버라이드 명령은 속도제어로 운전 중인 축에서는 동작하지 않습니다.
383
임의위치 속도 오버라이드 명령의 속도 오버라이드 값 범위를 초과했습니다.
임의위치 속도 오버라이드 명령의 속도 값은 0 이상, 기본 파라미 터의속도 제한치 이하로 설정하십시오.
384
임의위치 속도 오버라이드 명령은 직선보간운전 종 축에 대하여 실행할 수없습니다.
직선보간 주축에 임의위치 속도 오버라이드 명령을 실행하십시오.
385
임의위치 속도 오버라이드 명령은 원호(타원)보간 운전 종축에 대하여 실행할 수 없습니다.
원호(타원)보간 주축에 임의위치 속도 오버라이드 명령을 실행하 십시오.
386
임의위치 속도 오버라이드 명령은 동기운전 종축에 대하여 실행할 수 없습니다.
임의위치 속도 오버라이드 명령은 동기운전 종축으로 운전 중인 축에서는 동작하지 않습니다.
389
임의위치 속도 오버라이드 명령은 S-커브 가감속 패턴에서는 실행할 수 없습니다.
확장파라미터의 가감속 패턴을 사다리꼴 운전으로 변경한 후 임의 위치 속도 오버라이드 명령을 실행하십시오.
390
연속운전 명령은 S-커브 가감속 패턴에서는 실행할 수 없습니다.
확장파라미터의 가감속 패턴을 사다리꼴 운전으로 변경한 후 연속 운전 명령을 실행하십시오.
391
연속운전 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 운전 중인 상태에서 연속운전 명령을 실행하십시오.
392
연속운전 명령은 드웰중인 상태에서 실행할 수 없 습니다.
명령축이 드웰중이 아닌 상태에서 연속운전 명령을 실행하십시오.
393
연속운전 명령은 위치결정운전이 아닌 상태에서 실 행할 수 없습니다.
연속운전 명령은 속도제어로 운전 중인 축에서는 동작하지 않습니 다.
394
연속운전 명령의 다음 스텝의 속도 데이터 값이 허 용범위를 초과 했습니다.
연속운전 명령을 주는 시점에서 다음 스텝의 속도 값을 0 보다 크 고, 기본 파라미터의 속도 제한치보다 작거나 같게 설정한 후 연 속운전 명령을 실행하십시오.
395
연속운전 명령은 직선보간 운전의 종축에 대하여 실행할 수 없습니다.
직선보간 주축에 연속운전 명령을 실행하십시오.
396
연속운전 명령은 원호(타원)보간 운전 축에 대하여 실행할 수 없습니다.
연속운전 명령은 원호(타원)보간 운전 중인 축에서는 동작하지 않 습니다.
397
연속운전 명령은 동기운전의 종축에 대하여 실행할 수 없습니다.
연속운전 명령은 동기운전 종축으로 운전 중인 축에서는 동작하지 않습니다.
399
연속운전 명령은 운전데이터의 마지막 스텝에서는 실행할 수 없습니다.
연속운전 명령은 400 번째 스텝을 운전 중인 경우는 동작하지 않 습니다.
400
연속운전 명령은 직접기동 운전 중에는 실행할 수 없습니다.
연속운전 명령은 직접기동으로 운전 중인 축에서는 동작하지 않습 니다.
401
인칭운전 명령은 운전 중인 상태에서 실행할 수 없 습니다.
명령축이 정지 후 운전 중이 아닐 때 인칭운전 명령을 실행하십시 오.
403
인칭운전 명령은 서보 오프 상태에서 실행할 수 없 습니다.
서보온 명령으로 명령축을 서보 온 상태로 만든 후 인칭운전 명령 을 실행하십시오.
411
조그기동 명령은 운전 중인 상태에서 실행할 수 없 습니다.
명령축이 정지 후 운전 중이 아닐 때 조그운전 명령을 실행하십시 오.
413
조그기동 명령은 서보 오프 상태에서 실행할 수 없 습니다.
서보온 명령으로 명령축을 서보 온 상태로 만든 후 조그운전 명령 을 실행하십시오.
431
수동운전 이전위치 복귀 명령은 운전 중인 상태에 서 실행할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 수동운전 이전위치 복귀 명 령을 실행하십시오.
434
수동운전 이전위치 복귀 명령은 서보 오프 상태에 서 실행할 수 없습니다.
서보온 명령으로 명령축을 서보 온 상태로 만든 후 수동운전 이전 위치 복귀 명령을 실행하십시오.
441
기동스텝 번호변경 명령은 운전 중인 상태에서 실 행할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 기동스텝 번호변경 명령을 실행하십시오.
442
기동스텝번호변경/반복 운전 시작 스텝 번호가 지 정 명령의 스텝 지정 범위를 초과하였습니다.
스텝 설정 값을 1 이상, 400 이하로 설정한 후 기동스텝 번호변경 명령이나 반복스텝 번호변경 명령을 실행하십시오.
451
현재위치 프리셋 명령은 운전 중인 상태에서 실행 할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 현재위치 프리셋 명령을 실 행하십시오.
452
현재위치 프리셋 또는 부동원점 설정 명령의 위치 데이터 값은 소프트 상한과 하한의 범위를 초과하 여 설정할 수 없습니다.
현재위치 프리셋 또는 부동원점 설정 명령의 위치값이 확장 파라 미터에 설정한 소프트 상한과 소프트 하한의 범위 내에 있는지 확 인하십시오.
461
위치티칭 명령은 티칭 스텝이 운전 중인 상태에서 실행할 수 없습니다.
현재 운전 중인 스텝이 정지 후 운전 중이 아닐 때 위치티칭 명령 을 실행하십시오.
462
복수티칭 명령 티칭 개수 범위(16개)를 초과 했습 니다.
복수티칭 명령의 데이터 개수 설정을 1 이상, 16 이하로 설정한 후 복수티칭 명령을 실행하십시오.
463
속도티칭 명령은 티칭 스텝이 운전 중인 상태에서 실행할 수 없습니다.
현재 운전 중인 스텝이 정지 후 운전 중이 아닐 때 속도티칭 명령 을 실행하십시오.
465
복수 티칭 명령의 실행할 스텝 번호 지정 에러입니 다.
스텝 설정을 1 이상, 400 이하로 설정한 후 티칭 명령을 실행하십 시오.
466
복수 티칭 명령의 티칭 항목 에러입니다.
티칭 데이터 항목을 0: 위치 또는 1: 속도 중 하나로 설정 후 티 칭 명령을 실행하십시오.
467
복수 티칭 명령의 티칭 방법 에러입니다.
티칭 방법은 0: RAM티칭 또는 1: ROM티칭 중 하나로 설정 후 티칭 명령을 실행하십시오.
471
파라미터 티칭 명령은 운전 중인 상태에서 실행할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 파라미터 티칭 명령을 실행 하십시오.
472
운전데이터 티칭 명령은 운전 중인 상태에서 실행 할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 운전데이터 티칭 명령을 실 행하십시오.
473 설정된 항목을 티칭 할 수 없습니다.
파라미터 티칭 또는 운전데이터 티칭의 항목에 유효한 값을 설정 한 후 티칭 명령을 실행하십시오.
474
축이 운전 중인 상태에서 파라미터/운전데이터 저 장 명령을 실행할 수 없습니다.
파라미터/운전데이터 저장 명령을 주는 시점에서 축이 운전 중이 아니었는지 확인하십시오. 모든 축이 운전 중이 아닐 때 파라미터 /운전데이터 저장 명령을 실행하십시오.
475
티칭 데이터 설정 값 범위 초과 에러입니다.
파라미터티칭 또는 운전데이터 티칭의 데이터 설정 값을 지정항목 의 설정범위 안에서 설정한 후 티칭 명령을 실행하십시오.
476
티칭 방법 설정 값 범위 초과 에러입니다.
파라미터티칭 또는 운전데이터 티칭의 티칭 방법 설정 값을 0(RAM 티칭) 또는 1(ROM티칭)로 설정한 후 티칭 명령을 실행하십시오.
477
파라미터/운전데이터 저장 중 전원이 Off되어 파라 미터/운전데이터가 손실되었을 가능성이 있습니다.
XG-PM에서 "프로젝트 쓰기" 명령으로 파라미터/운전데이터 쓰기를 실행하십시오.
478
캠데이터 저장 중 전원이 Off되어 캠데이터가 손실 되었을 가능성이 있습니다.
XG-PM에서 "프로젝트 쓰기" 명령으로 캠데이터 쓰기를 실행하십시 오.
481 내부 비상정지 에러입니다.
비상정지 요인을 제거하고 에러리셋 명령을 실행하여 에러를 지우 십시오.
491 외부 비상정지 에러입니다.
비상정지 요인을 제거하고 에러리셋 명령을 실행하여 에러를 지우 십시오.
492 하드 상한 에러입니다.
역방향 조그 명령을 이용하여 외부 상한 신호 범위를 벗어난 후 에러리셋 명령을 실행하여 에러를 지우십시오.
493 하드 하한 에러입니다.
정방향 조그 명령을 이용하여 외부 하한 신호 범위를 벗어난 후 에러리셋 명령을 실행하여 에러를 지우십시오.
501 소프트 상한 에러입니다.
역방향 조그 명령을 이용하여 소프트 상한 범위를 벗어난 후 에러 리셋 명령을 실행하여 에러를 지우십시오.
502 소프트 하한 에러입니다.
정방향 조그 명령을 이용하여 소프트 하한 범위를 벗어난 후 에러 리셋 명령을 실행하여 에러를 지우십시오.
511 명령어가 적합하지 않습니다.
사용된 명령이 해당 모듈에 적합한 것인지 확인하십시오. 사용설 명서 명령어 부분을 참조하시기 바랍니다.
512
보조데이터 스텝번호가 허용 범위를 초과 했습니 다.
명령에 400 보다 큰 스텝번호를 설정했습니다. 스텝번호를 1번에 서 400번까지의 범위에서 재설정 하십시오.
521
운전 중 서보 드라이브 에러 발생으로 명령을 실행 할 수 없습니다.
서보 에러 요인을 제거한 후 서보 에러 리셋 명령으로 서보 에러 를 지우십시오.
522
운전 중 서보 오프 되어 명령을 실행할 수 없습니 다.
서보 온 명령으로 명령축을 서보 온 상태로 만든 후 명령을 재실 행하십시오.
523
운전 중 "Quick Stop" 기능이 활성화 되어 명령을 실행할 수 없습니다.
비상정지 등의 입력으로 서보드라이브의 "Quick Stop" 기능이 활 성화 되지 않았는지 확인하십시오.
531
엔코더 프리셋 명령 시 엔코더 번호 초과 에러입니 다.
엔코더 번호를 0 (엔코더1)또는 1(엔코더2)로 설정한 후 엔코더 프리셋 명령을 실행하십시오.
532
엔코더1을 주축으로 운전하는 축이 있으므로 프리 셋 명령을 실행할 수 없습니다.
엔코더1을 주축으로 운전하는 축이 정지 후 운전 중이 아닐 때 엔 코더 프리셋 명령을 실행하십시오.
533
엔코더2를 주축으로 운전하는 축이 있으므로 프리 셋 명령을 실행할 수 없습니다.
엔코더2를 주축으로 운전하는 축이 정지 후 운전 중이 아닐 때 엔 코더 프리셋 명령을 실행하십시오.
534
엔코더 프리셋 위치가 엔코더1의 최대값 또는 최소 값의 범위를 벗어났습니다.
엔코더 프리셋 위치 값을 공통파라미터의 엔코더1 최소값 이상, 최대값 이하로 설정한 후 엔코더 프리셋 명령을 실행하십시오.
535
엔코더 프리셋 위치가 엔코더2의 최대값 또는 최소 값의 범위를 벗어났습니다.
엔코더 프리셋 위치 값을 공통파라미터의 엔코더2 최소값 이상, 최대값 이하로 설정한 후 엔코더 프리셋 명령을 실행하십시오.
541
타원보간 주축이 운전 중인 상태에서 타원보간 기 동을 실행할 수 없습니다.
주축이 정지 후 운전 중이 아닐 때 타원보간 명령을 실행하십시 오.
542
타원보간 종축이 운전 중인 상태에서 타원보간 기 동을 실행할 수 없습니다.
종축이 정지 후 운전 중이 아닐 때 타원보간 명령을 실행하십시 오.
543
타원보간 주축의 M코드 On 신호가 On 되어 있는 상 태에서 타원보간 기동을 실행할 수 없습니다.
M코드해제(MOF) 명령으로 주축의 M코드 On 신호를 Off시킨 후 타 원보간 명령을 실행하십시오.
544
타원보간 종축의 M코드 On 신호가 On 되어 있는 상 태에서 타원보간 기동을 실행할 수 없습니다.
M코드해제(MOF) 명령으로 종축의 M코드 On 신호를 Off 시킨 후 타 원보간 명령을 실행하십시오.
545
타원보간 주축이 원점미결정 상태에서 절대좌표 위 치결정운전을 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 주축을 원점결정 상태 로 만든 후 타원보간 명령을 실행하십시오.
546
타원보간 종축이 원점미결정 상태에서 절대좌표 위 치결정운전을 실행할 수 없습니다.
원점복귀 명령이나 부동원점설정 명령으로 종축을 원점결정 상태 로 만든 후 타원보간 명령을 실행하십시오.
547
타원보간에서 주축 종축 설정이 잘못 되었습니 다.(종축을 지정하지 않은 경우, 헬리컬보간 축을 설정한 경우, 현재 운전 가능한 축 번호가 아닌 경 우)
종축설정에 네트워크에 연결된 축들 중 주축 이외의 축을 하나 설 정하고, 헬리컬 보간 설정을 사용안함으로 설정한 후 타원보간 명 령을 실행하십시오.
548
타원보간은 중간점, 반지름 방식에서는 실행할 수 없습니다.
타원보간은 중심점 방식에서만 실행할 수 있습니다. 운전데이터의 원호보간모드를 중심점 방식으로 변경한 후 타원보간 명령을 실행 하십시오.
549
타원보간 주축이 서보 오프 상태에서 운전을 실행 할 수 없습니다.
서보온 명령으로 주축을 서보 온 상태로 만든 후 타원보간 명령을 실행하십시오.
550
타원보간 종축이 서보 오프 상태에서 운전을 실행 할 수 없습니다.
서보온 명령으로 종축을 서보 온 상태로 만든 후 타원보간 명령을 실행하십시오.
551
타원보간에서 주축의 단위가 degree인 경우 운전을 실행할 수 없습니다.
타원보간 주축의 기본 파라미터의 단위를 degree 이외의 값으로 변경한 후 타원보간 명령을 실행하십시오.
552
타원보간에서 종축의 단위가 degree인 경우 운전을 실행할 수 없습니다.
타원보간 종축의 기본 파라미터의 단위를 degree 이외의 값으로 변경한 후 타원보간 명령을 실행하십시오.
553
타원보간에서 시작점 = 중심점(중간점) 혹은 중심 점(중간점) = 끝점이면 운전을 실행할 수 없습니 다.
타원보간에서 중심점의 위치를 시작점(또는 끝점)과 다르게 설정 한 후 타원보간 명령을 실행하십시오.
554 타원보간에서 반지름 설정 에러입니다.
타원보간 운전이 실행될 수 있는 원의 반지름은 0 이상, 2147483647pulse 이하입니다. 중심점의 위치를 변경하여 원의 반 지름을 2147483647pulse이하가 되게 설정하십시오.
555
타원보간의 각속도가 90도 이상이므로 정확한 원을 그릴 수 없습니다.
타원보간의 각속도가 90 도를 넘지 않도록 운전속도를 낮게 설정 하십시오.
556
타원보간에서 계속운전 또는 연속운전은 실행할 수 없습니다.
타원보간 운전 스텝의 운전패턴을 종료로 설정한 후 타원보간 명 령을 실행하십시오.
557
타원보간은 제어방식이 원호보간이 아닌 경우는 실 행할 수 없습니다.
타원보간 운전 스텝의 제어방식을 원호보간으로 설정한 후 타원보 간 명령을 실행하십시오.
558
타원보간에서 시작점과 끝점이 같지 않으면 운전을 실행할 수 없습니다.
타원보간 운전 스텝의 목표위치를 현재 위치와 같게 설정한 후 타 원보간 명령을 실행하십시오.
559
타원보간에서 운전각도가 0인 경우 운전을 실행할 수 없습니다.
타원보간 명령의 운전각 설정을 0 보다 큰 값으로 설정하십시오. (1~65535)
561
위치/토크 전환 명령은 운전 중이 아닌 상태에서 실행할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 위치/토크 전환 명령을 실행 하십시오.
562
위치/토크 전환 명령은 동기운전의 종축에서는 실 행할 수 없습니다.
위치/토크 전환 명령은 동기운전 종축으로 운전 중인 축에서는 동 작하지 않습니다.
563
위치/토크 전환 명령은 원호(타원)보간 운전 중에 는 실행할 수 없습니다.
위치/토크 전환 명령은 원호(타원)보간 운전 중인 축에서는 동작 하지 않습니다.
564
위치/토크 전환 명령은 직선보간 운전 중에는 실행 할 수 없습니다.
위치/토크 전환 명령은 직선보간 운전 중인 축에서는 동작하지 않 습니다.
565
서보드라이브가 토크제어 모드를 지원하지 않아 토 크제어를 실행할 수 없습니다.
해당 서보드라이브에서는 토크제어 명령을 실행할 수 없습니다.
571
현재축을 주축으로 하는 종축의 에러 발생으로 운 전을 실행할 수 없습니다.
현재축이 운전 중인 상태에서 현재축을 주축으로 하는 종축이 에 러가 발생하였는지 확인하십시오.
572
보간축 중 하나를 주축으로 하는 종축의 에러발생 으로 보간 운전을 실행할 수 없습니다.
보간 운전 중 보간축 중 하나를 주축으로 하는 종축이 에러가 발 생하였는지 확인하십시오.
582
무한갈이 반복 모드에서 최단거리 위치제어 시 목 표위치 설정이 잘못되었습니다.
무한길이 반복모드에서 최단거리 위치제어 시는 목표위치를 0이상 이고, 확장파라미터의 "무한길이 반복위치" 이하로 설정하십시오.
591
서보파라미터 쓰기 명령은 운전 중인 상태에서 실 행할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 서보파라미터 쓰기 명령을 실행하십시오.
592
서보파라미터 Index, SubIndex 등의 데이터 범위가 허용된 값을 벗어났습니다.
서보파라미터의 Index, SubIndex 등의 데이터 설정값이 범위를 벗 어나지 않았는지 확인하십시오.
593
서보파라미터 쓰기 명령 중 Abort가 발생하였습니 다.
파라미터가 쓰기 가능한 항목인지 또는 파라미터 번호 및 설정 데 이터가 허용된 범위 인지 확인하십시오. 서보드라이브 상태에 따 라 해당 파라미터를 쓸 수 없는 경우가 있습니다.
594
서보파라미터 쓰기 명령에 대한 서보드라이브의 응 답이 없습니다.
서보드라이브의 상태가 정상인지 점검하시기 바랍니다.
595
서보파라미터 EEPROM 저장 명령은 서보 온 상태에 서 실행할 수 없습니다.
서보오프 명령으로 서보 오프 상태로 만든 후 서보파라미터 EEPROM 저장 명령을 실행하십시오.
596
서보파라미터 EEPROM 저장 중 Abort가 발생하였습 니다.
서보드라이브의 상태를 점검하시기 바랍니다. 특정 상태에서는 서 보파라미터 EEPROM 저장 명령이 실행되지 않을 수 있습니다.
597
서보파라미터 EEPROM 저장 명령에 대한 서보드라이 브의 응답이 없습니다.
서보드라이브의 상태가 정상인지 점검하시기 바랍니다.
598
서보파라미터 EEPROM 저장 축이 현재 연결되지 않 은 축입니다.
현재 네트워크에 연결된 축에 대해서만 서보파라미터 EEPROM 저장 명령을 실행 할 수 있습니다.
599
서보파라미터 쓰기 또는 서보파라미터 EEPROM 저장 중 다른 명령을 실행할 수 없습니다.
서보파라미터 쓰기 또는 서보파라미터 EEPROM 저장 명령이 완료된 후 명령을 실행하십시오.
600
서보파라미터 읽기 명령 중 Abort가 발생하였습니 다.
파라미터가 읽기 가능한 항목인지 또는 파라미터 번호가 허용된 범위 인지 확인하십시오. 서보드라이브 상태에 따라 해당 파라미 터를 읽을 수 없는 경우가 있습니다.
601
서보파라미터 읽기 명령에 대한 서보드라이브의 응 답이 없습니다.
서보드라이브의 상태가 정상인지 점검하시기 바랍니다.
602
서보파라미터 읽기 명령 실행 중 서보파라미터 읽 기/쓰기 또는 서보파라미터 EEPROM 저장 명령을 실 행 할 수 없습니다.
서보파라미터 읽기 명령이 완료된 후 명령을 실행하십시오.
701
캠 명령은 운전 중인 상태에서 실행할 수 없습니 다.
명령축이 정지 후 운전 중이 아닐 때 캠 명령을 실행하십시오.
702
캠 명령은 M코드 On 신호가 On 되어 있는 상태에서 실행할 수 없습니다.
M코드해제(MOF) 명령으로 명령축의 M코드 On 신호를 Off시킨 후 캠 명령을 실행하십시오.
703
캠 명령은 서보 오프 상태에서 실행할 수 없습니 다.
서보온 명령으로 명령축을 서보 온 상태로 만든 후 캠 명령을 실 행하십시오.
704
캠 명령의 주축/종축 설정에 오류가 있습니다.
캠 명령의 주축설정을 연결된 축들 중 명령축과 다른 축으로 설정 하십시오. 주축설정은 1(1축)~8(8축) 값으로 설정합니다.
706
캠 명령의 캠 블록 설정에 오류가 있습니다.
캠 명령의 캠 블록 설정에 1 이상, 8 이하인 값을 설정한 후 캠 명령을 실행하십시오.
707
캠 명령의 지정한 블록의 캠 데이터에 오류가 있습 니다.
캠 명령의 지정한 블록의 데이터를 올바르게 설정한 후 캠 명령을 실행하십시오.
708
캠 명령의 종축의 속도가 속도 제한치를 넘을 수 없습니다.
캠 데이터의 종축 위치로 계산된 종축의 속도가 속도 제한치를 넘 지 않도록 주축의 속도를 낮추어 운전하십시오.
709
캠 명령은 주축이 엔코더일 경우 캠 데이터의 주축 단위가 펄스가 아닌 상태에서 실행 할 수 없습니 다.
캠 데이터의 주축을 엔코더로 설정했을 때는 해당 캠블록의 주축 의 단위를 펄스로 설정하십시오.
710
캠 명령의 주축의 속도가 높아서 제어주기당 이동 위치가 캠 데이터의 주축 범위를 벗어났습니다.
주축의 속도를 낮추어 운전하십시오.
711
가변 데이터 읽기/쓰기 명령의 데이터 영역 설정 값(블록 크기 및 블록 개수)이 범위를 벗어났습니 다.
[블록 크기 X 블록 개수] 값이 1 이상 128 이하가 되도록 블록 크 기와 블록 개수를 설정하십시오.
712
가변 데이터 쓰기 명령은 운전중인 상태에서 수행 할 수 없습니다.
가변 데이터 쓰기 명령을 실행한 시점에서 한 축이라도 운전중 상 태가 아니었는지 확인하십시오.
713
가변 데이터 쓰기 명령의 블록 영역이 서로 중복되 어 쓰기를 수행할 수 없습니다.
블록 개수가 2이상인 경우 블록 옵셋을 블록 크기 이상으로 설정 하십시오. (또는 블록 크기를 블록 옵셋 이하로 설정하십시오.)
721
원호보간 등 재기동을 실행할 수 없는 운전 후에는 재기동 명령을 실행할 수 없습니다.
재기동 명령 실행 전 재기동이 실행 될 수 없는 운전을 실행하지 않았는지 확인하십시오.
722
재기동 명령은 운전 중인 상태에서 실행할 수 없습 니다.
명령축이 정지 후 운전 중이 아닐 때 재기동 명령을 실행하십시 오.
741
토크제어 명령은 토크제어 이외의 운전 중인 상태 에서 실행할 수 없습니다.
명령축이 정지 후 운전 중이 아닐 때 토크제어 명령을 실행하십시 오.
742
토크제어 명령은 M코드 On 신호가 On되어있는 상태 에서 실행할 수 없습니다.
M코드해제(MOF) 명령으로 에러가 발생한 축의 M코드 On 신호를 Off 시킨 후 토크제어 명령을 실행하십시오.
743
토크제어 명령은 서보 오프 상태에서 실행할 수 없 습니다.
서보온 명령으로 에러가 발생한 축을 서보 온 상태로 만든 후 토 크제어 명령을 실행하십시오
751
서보드라이브가 래치(Touch Probe) 기능을 지원하 지 않아 래치 설정 명령을 실행할 수 없습니다.
해당 서보드라이브에서는 래치 설정 명령을 실행할 수 없습니다.
761
캠 재기동 운전은 주축이 운전 중인 경우 실행할 수 없습니다.
주축이 운전을 멈추고 정지 중인 상태에서 캠 운전 명령을 실행하 시기 바랍니다.
762
캠 재기동 운전은 종축이 종축 동기 위치로 이동 중 주축이 운전되는 경우 운전을 계속할 수 없습니 다.
캠 재기동 운전 시작 후 종축이 종축 동기 위치로 이동 중 주축이 실행되지 않도록 하시기 바랍니다.
771
위상 보정 명령은 명령 축이 동기 제어(캠, 속도동 기) 운전 중이 아닌 경우 실행 할 수 없습니다.
명령 축이 동기 제어 운전 중인 상태에서 위상 보정 명령을 실행 하십시오.
772
위상 보정 명령의 주축 설정에 오류가 있습니다.
위상 보정 명령의 주축 설정을 현재 동기 운전의 실제 주축과 동 일하게 설정한 후 명령을 실행하십시오.
773
위상 보정 명령의 위상 보정량이 위치표현 범위를 벗어났습니다.
위상 보정량이 펄스단위로 -2147483648이상, 2147483647이하의 범 위가 되도록 위상 보정량을 설정한 후 명령을 실행하십시오.
774
위상 보정 명령의 속도 설정 값이 범위를 벗어났습 니다.
위상 보정 명령의 속도 값을 1이상, 주축의 속도 제한치 이하의 범위가 되도록 설정한 후 명령을 실행하십시오.
775
위상 보정 명령의 가속 시간 설정 값이 범위를 벗 어났습니다.
위상 보정 명령의 가속 시간 설정 값을 0이상, 2147483647이하의 범위가 되도록 설정한 후 명령을 실행하십시오.
776
위상 보정 명령의 감속 시간 설정 값이 범위를 벗 어났습니다.
위상 보정 명령의 감속 시간 설정 값을 0이상, 2147483647이하의 범위가 되도록 설정한 후 명령을 실행하십시오.
801
명령축이 현재 네트워크에 연결되지 않은 축입니 다.
명령축이 현재 네트워크에 연결되어 있는 축인지 확인 하시오. 현 재 네트워크에 연결된 축에 명령을 실행하십시오.
821
가상축으로 설정된 축에서 수행할 수 없는 명령입 니다.
명령축이 가상축인지 확인 하시오. 현재 네트워크에 연결된 실축 에 명령을 실행하십시오.
5001
현재 네트워크에 연결된 서보가 없습니다.
서보 드라이브 접속 시 네트워크에 연결된 서보의 전원이 켜져 있 었는지 혹은 모듈과 네트워크에 연결된 첫 번째 서보 드라이브 사 이에 통신 케이블이 정상적으로 설치되었는지 확인하십시오.
5002 ~ 5006
서보 통신 초기화 오류입니다.
통신 케이블이 정상적으로 설치되어 있는지 혹은 통신 케이블이 노 이즈에 노출되어 있지 않은지 확인하십시오.
5007
서보 파라미터 읽기 통신 오류입니다.
통신 케이블이 정상적으로 설치되어 있는지 혹은 통신 케이블이 노 이즈에 노출되어 있지 않은지 확인하십시오.
5008
정주기 통신 오류입니다.
통신 중 서보의 전원이 Off 되지 않았는지, 통신 케이블이 정상적 으로 설치되어 있는지 혹은 통신 케이블이 노이즈에 노출되어 있지 않은지 확인하십시오.
5009
통신 설정 오류입니다.
통신 중 서보의 전원이 Off 되지 않았는지, 통신 케이블이 정상적 으로 설치되어 있는지 혹은 통신 케이블이 노이즈에 노출되어 있지 않은지 확인하십시오.
5010
서보 축 번호 설정 오류입니다.
현재 네트워크에 연결된 서보 드라이브들 중 같은 축 번호를 가진 것이 있습니다. 서보 드라이브의 축 번호를 다시 설정하십시오.
5011
단일 서보 파라미터 쓰기 오류입니다.
통신 케이블이 정상적으로 설치되어 있는지 혹은 통신 케이블이 노 이즈에 노출되어 있지 않은지 확인하십시오.
5012
단일 서보 파라미터 읽기 오류입니다.
통신 케이블이 정상적으로 설치되어 있는지 혹은 통신 케이블이 노 이즈에 노출되어 있지 않은지 확인하십시오.
5013
서보 통신 초기화 오류입니다.
통신 케이블이 정상적으로 설치되어 있는지 혹은 통신 케이블이 노 이즈에 노출되어 있지 않은지 확인하십시오.
5014
서보 통신 초기화 오류입니다.
통신 케이블이 정상적으로 설치되어 있는지 혹은 통신 케이블이 노 이즈에 노출되어 있지 않은지 확인하십시오.
5015
서보 파라미터 쓰기 통신 오류입니다.
통신 케이블이 정상적으로 설치되어 있는지 혹은 통신 케이블이 노 이즈에 노출되어 있지 않은지 확인하십시오.
5020
현재 네트워크에 연결된 서보드라이브에 대한 설정 정보가 없습니다.
네트워크 파라미터에 해당 서보드라이브를 추가하여 네트워크 파라 미터 쓰기를 실행 한 후 전체 서보 연결 명령을 실행하십시오.
5021
네트워크 파라미터에 설정된 데이터가 없습니다.
네트워크 파라미터를 설정하여 모듈에 네트워크 파라미터 쓰기를 실행 한 후 전체 서보 연결 명령을 실행하십시오.
5022
네트워크 파라미터에 설정된 서보드라이브 정보와 실제 연결된 서보드라이브 정보가 다릅니다.
네트워크 파라미터에 실제 연결된 서보드라이브의 개수와 정보를 동일하게 설정하십시오.
5023
서보드라이브의 운전모드를 위치제어 모드로 변경 하지 못하였습니다.
서보드라이브의 상태가 정상인지 점검하시기 바랍니다.
5024
서보드라이브의 운전모드를 원점복귀(Homing) 모드 로 변경하지 못하였습니다.
서보드라이브의 상태가 정상인지 점검하시기 바랍니다.
5025
서보드라이브의 운전모드를 토크제어 모드로 변경 하지 못하였습니다.
서보드라이브의 상태가 정상인지 점검하시기 바랍니다.
5026
서보드라이브를 "Switched on" 상태로 변경하지 못 하여, 서보온을 완료할 수 없습니다.
서보드라이브의 상태를 점검하시기 바랍니다. 특정 상태에서는 서 보온 명령이 실행되지 않을 수 있습니다.
5027
서보드라이브를 "Operation enabled" 상태로 변경 하지 못하여, 서보온을 완료할 수 없습니다.
서보드라이브의 상태를 점검하시기 바랍니다. 특정 상태에서는 서 보온 명령이 실행되지 않을 수 있습니다.
5028
서보드라이브의 "Quick Stop" 기능이 활성화되어 서보온을 완료할 수 없습니다.
비상정지 등의 입력으로 서보드라이브의 "Quick Stop" 기능이 활성 화 되지 않았는지 확인하십시오. 특정 상태에서는 서보온 명령이 실행되지 않을 수 있습니다.
5031
가상축 설정 오류 입니다.
현재 실축으로 연결된 축을 가상축으로 설정할 수 없습니다. 가상축은 실축으로 연결되지 않은 축으로 설정하십시오.